Flying Triangulation
A handheld motion-robust 3D scanner
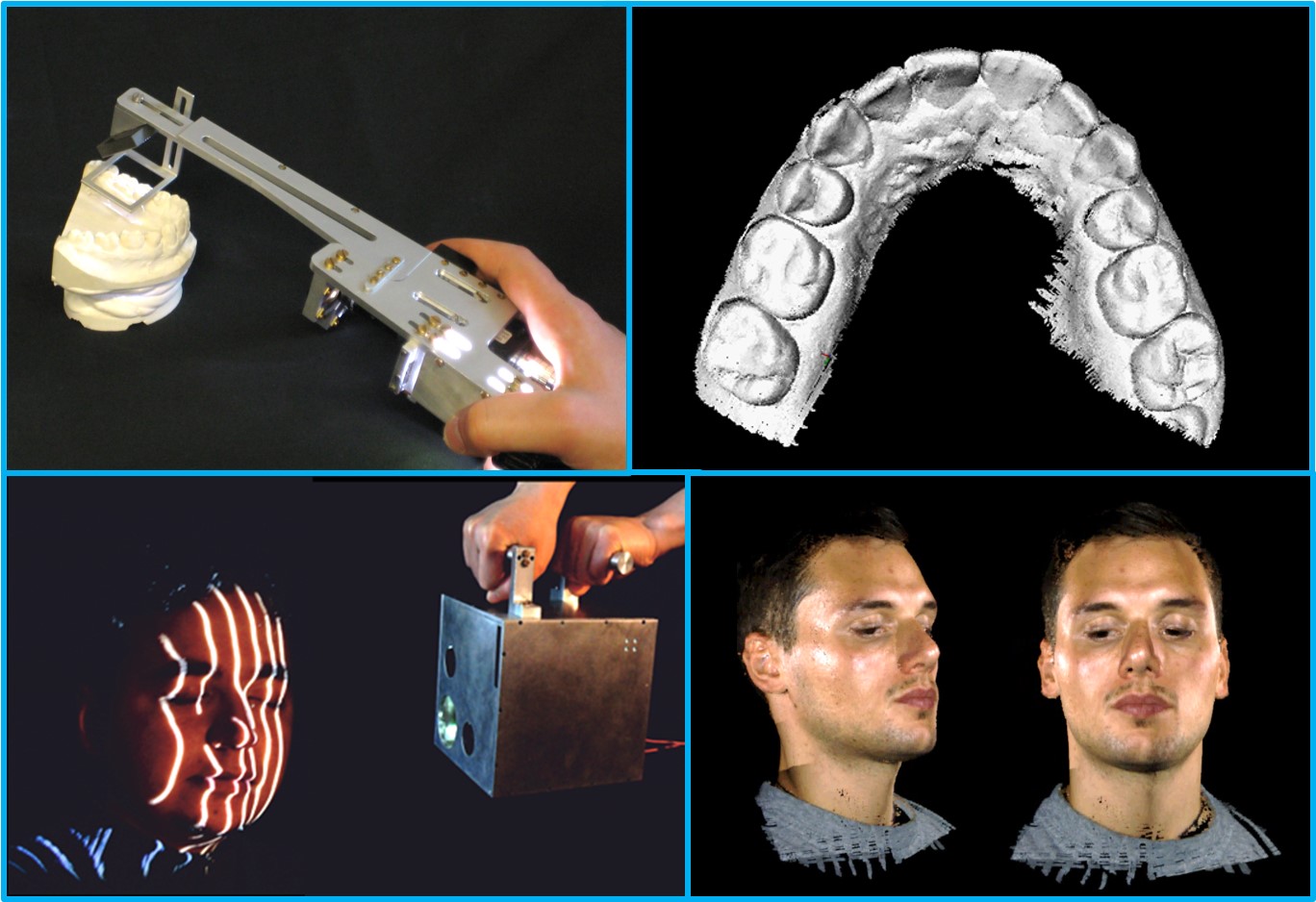
Flying Triangulation is a sensor concept for motion robust high precision optical 3D imaging. A line triangulation sensor projecting ~10 straight narrow lines is paired with sophisticated real-time registration algorithms. Along each projected line, a nearly perfect 3D profile of the object surface is created within only one camera frame (‘single-shot’). Captured sparse 3D line profiles are registered to each other ‘on-the-fly’ while the sensor is free-hand guided around the object or the object is moved in front of the sensor (see videos). The result is a dense 3D model of the object with extremely high depth precision (δz ≤ 30 μm for the shown dental scanner).
Applications: The Flying Triangulation principle was used in several metrology tasks for remote and close range sensing, e.g., in industrial inspection, cultural heritage analysis, and forensics. Moreover, the concept was applied to several medicine-related problems and was the starting point for numerous cooperations. Applications included the co-registration of 3D shape data with EEG, MEG, and MRI data, the motion compensation during radiation therapy, as well as several surface shape capturing tasks for intraoral medicine, wound healing, orthopedic and esthetic surgery applications. Moreover, the concept was used in several cultural heritage or forensic applications.
Jump to: [Selected Videos] , [News and Press] , [Publications - general] , [Publications - medical applications]
Selected Videos
News and Press
| Interview Flying Triangulation (March 2013) German with english subtitles |
Publications - Flying Triangulation general
Flying Triangulation – a motion-robust optical 3D sensor for the real-time shape acquisition of complex objects.
F. Willomitzer, S. Ettl, O. Arold, G. Häusler.
Proceedings of the 3rd International Topical Meeting on Optical Sensing and Artificial Vision, Saint Petersburg, Russia, AIP Volume 1537, 2013
Hand – guided 3D surface acquisition by combining simple light sectioning with real-time algorithms
O. Arold, S. Ettl, F. Willomitzer, G. Häusler
arXiv:1401.1946. 2014
Single-shot 3D sensing with improved data density
F. Willomitzer, S. Ettl, C. Faber, G. Häusler.
Applied Optics, 54(3), 408-417, 2017
Flying Triangulation – Towards the 3D Movie Camera
F. Willomitzer, S. Ettl, O. Arold, G. Häusler.
Fringe 2013, The 7th International Workshop on Advanced Optical Imaging & Metrology, W. Osten, Springer, Berlin, 2014
Detection and correction of line indexing ambiguities in Flying Triangulation
F. Willomitzer, S. Ettl, O. Arold, G. Häusler.
Proceedings of the 114th DGaO Conference, Braunschweig, A12, 2013
Plausibility-based approach to eliminate line pattern indexing ambiguities
S. Ettl, F. Willomitzer, G. Häusler.
Proceedings of the 115th DGaO Conference, Karlsruhe, A22, 2014
Calibration of multi-line-light-sectioning
F. Schiffers, F. Willomitzer, S. Ettl, Z. Yang, G. Häusler.
Proceedings of the 115th DGaO Conference, Karlsruhe, P12, 2014
Calibration of “Flying Triangulation”
M. Schröter, F. Willomitzer, O. Arold, S. Ettl, G. Häusler.
Proceedings of the 113th DGaO Conference, Eindhoven, P25, 2012
Robust pattern indexing methods for “Flying Triangulation”
S. Ettl, F. Willomitzer, O. Arold, G. Häusler.
Proceedings of the 113th DGaO Conference, Eindhoven, P24, 2012
Options and limitations of “Flying Triangulation”
F. Willomitzer, O. Arold, F. Huber, S. Ettl, G. Häusler.
Proceedings of the 112th DGaO Conference, Ilmenau, P29, 2011
FlyFace – 3D face measurement with Flying Triangulation
F. Willomitzer
Diploma Thesis, University Erlangen-Nuremberg, 2010
Publications - Medical applications of Flying Triangulation
Consequences of EEG electrode position error on ultimate beamformer source reconstruction performance
S. S. Dalal, S. Rampp, F. Willomitzer, S. Ettl.
Frontiers in Neuroscience, 8(42), 1-7, 2014
Management of head motion during MEG recordings with Flying Triangulation
S. Ettl, A. Sadeghzadeh, F. Willomitzer, O. Arold, S. Rampp, H. Stefan, G. Häusler.
Proceedings of the 114th DGaO Conference, Braunschweig, A13, 2013
Automated evaluation tools in medicine enabled by a motion-robust optical 3D sensor
S. Ettl, F. Schiffers, F. Willomitzer, S. Rampp, C. Strauss, G. Häusler.
Proceedings of the 115th DGaO Conference, Karlsruhe, P10, 2014
Improved EEG source localization employing 3D sensing by “Flying Triangulation
S. Ettl, S. Rampp, S. Fouladi, S. S. Dalal, F. Willomitzer, O. Arold, H. Stefan, G. Häusler.
Proceedings SPIE 8791A, Videometrics, Range Imaging, and Applications XII, 8791-32, 2013
Sparse active triangulation grids for respiratory motion management
S. Bauer, S. Ettl, J. Wasza, F. Willomitzer, F. Huber, J. Hornegger, G. Häusler.
Proceedings of the 112th DGaO Conference, Ilmenau, P23, 2012
Medical applications enabled by a motion-robust optical 3D sensor
S. Ettl, S. Fouladi-Mavahed, S. Bauer, O. Arold, F. Willomitzer, F. Huber, S. Rampp, H. Stefan, J. Hornegger, G. Häusler.
Proceedings of the 113th DGaO Conference, Eindhoven, P22, 2012
3D body scanning with “Flying Triangulation”
F. Huber, O. Arold, F. Willomitzer, S. Ettl, G. Häusler.
Proceedings of the 112th DGaO Conference, Ilmenau, P30 (poster award), 2012
„Flying Triangulation“ – Acquiring 360° Topography of the Human Body on the Fly
S. Ettl, O. Arold, F. Willomitzer, Z. Yang, G. Häusler.
Proceedings of the International Conference on 3D Body Scanning Technologies, Lugano, Switzerland, 279-284, 2010
3D face scanning with “Flying Triangulation”
F. Willomitzer, Z. Yang, O. Arold, S. Ettl, G. Häusler.
Proceedings of the 111th DGaO Conference, Wetzlar, P18 (poster award), 2010